 Coursera
Coursera
University of Colorado Boulder
Robotic Mapping and Trajectory Generation (Coursera)
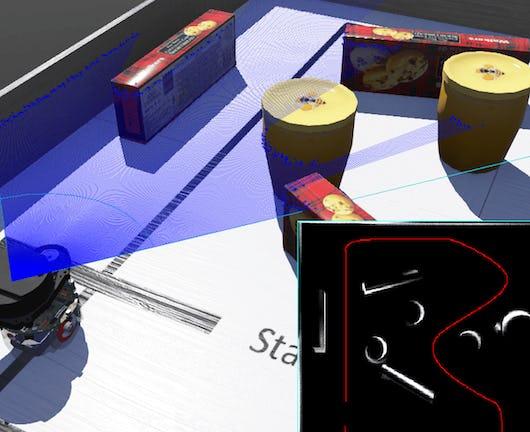
Embark on an exciting journey into the world of advanced robotics with 'Robotic Mapping and Trajectory Generation'. This course is designed for those who want to delve deeper into the intricacies of robotic systems, focusing on mapping techniques and trajectory planning. Learn how to perform complex tasks such as inverse kinematics and control feedback, and master the art of processing multi-dimensional sensor data like laser range scanners. Gain insights into modeling uncertainties in mechanisms and sensors, and learn effective strategies for controlling them.

