Categories
Effort
Languages
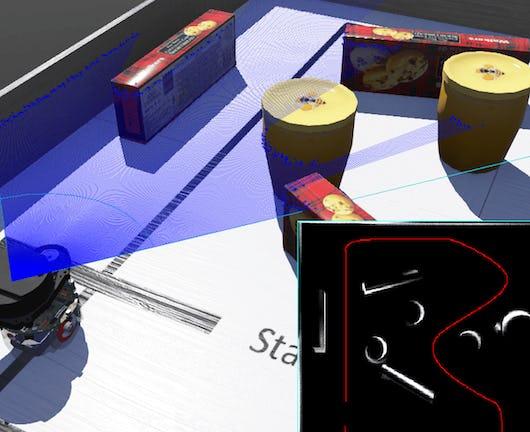
In this second course of the Introduction to Robotics specialization, "Robotic Mapping and Trajectory Generation", you will learn how to perform basic inverse kinematics of (non-)holonomic systems using a feedback control approach. You will also learn how to process multi-dimensional sensor signals such as laser range scanners for mapping. [...]