In this second course of the Introduction to Robotics specialization, "Robotic Mapping and Trajectory Generation", you will learn how to perform basic inverse kinematics of (non-)holonomic systems using a feedback control approach. You will also learn how to process multi-dimensional sensor signals such as laser range scanners for mapping. Additionally, you will apply the overarching focus of mechanisms and sensors as sources of uncertainty and gain techniques to how to model and control them.
Class Deals by MOOC List - Click here and see Coursera's Active Discounts, Deals, and Promo Codes.
It is recommended that you complete the first course of this specialization, “Introduction to Robotics: Basic Behaviors”, before beginning this one.
This course is part of the Introduction to Robotics with Webots Specialization.
What you'll learn
- Use basic feedback control techniques for inverse kinematics of (non-)Holonomic mechanisms.
Apply coordinate transforms to multi-dimensional sensor signals.
Understand basic probabilistic representations to deal with uncertainty from measurement noise.
Syllabus
Advanced Sensor: Range finders and Homogeneous transforms
Module 1
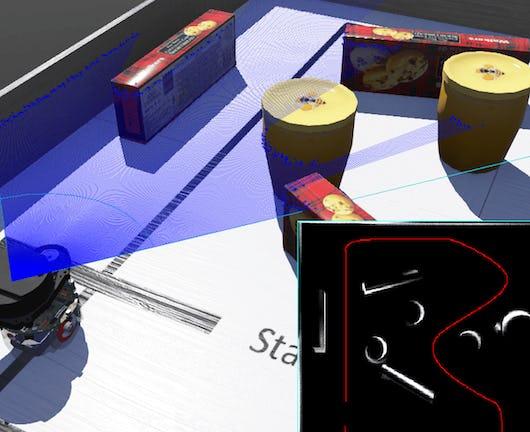
Welcome to Week 1 of the course. You will get started by being introduced to the class of "range finder" devices, which have important applications in mapping, as well as the concept of homogeneous transforms to perform coordinate transformations.
Mapping: Basic Representations
Module 2
In this week, you will begin to understand basic discrete map representations and their implementation.
Mapping: Probabilistic Representations and Configuration Space
Module 3
This week introduces simple ways to encode obstacles in terms of probability, the concept of "configuration space", and a simple algorithm for collision checking.
Inverse Kinematics: Trajectory Following
Module 4
In this week you will learn to define a robot trajectory based on a series of waypoints and implement a basic proportional controller in Webots to navigate in a 2D environment.
Implementing Mapping and Trajectory Generation
Module 5
In this module you will transfer your mapping and trajectory following skills to a commercial robotic platform in a kitchen environment, introducing you to additional constraints of sensor integration on a real robotic platform.