Categories
Effort
Languages
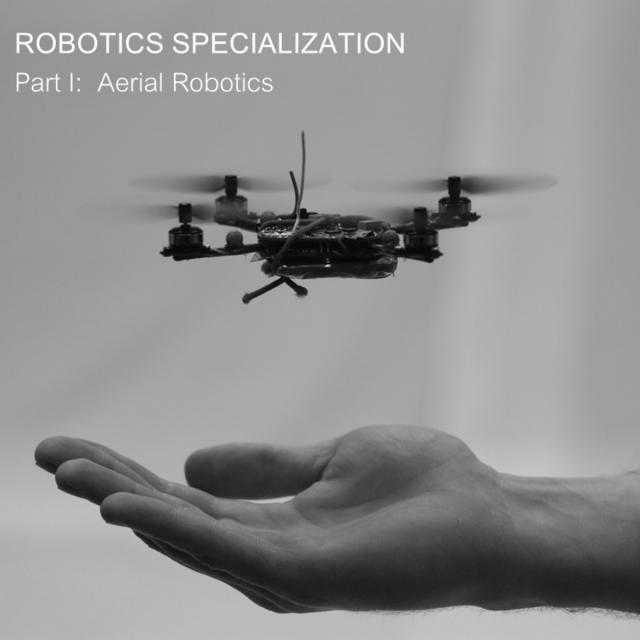
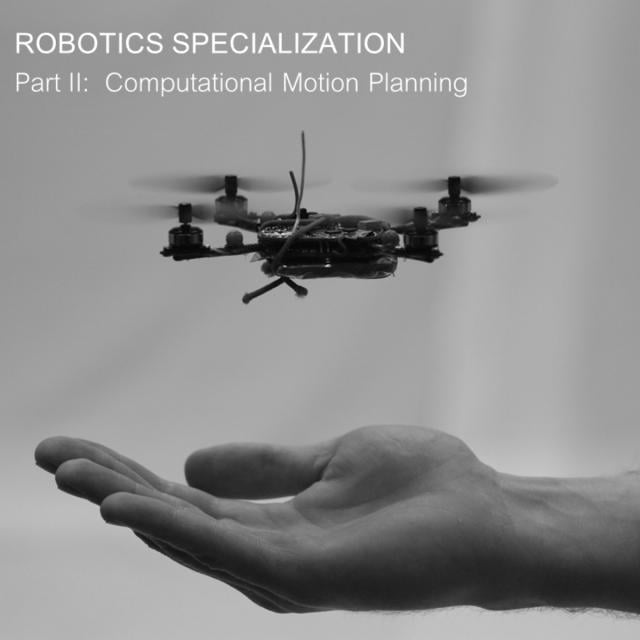
Learn the core techniques for representing robots that perform physical tasks in the real world. We think of Robotics as the science of building devices that physically interact with their environment. The most useful robots do it precisely, powerfully, repeatedly, tirelessly, fast, or some combinations of these. The most [...]